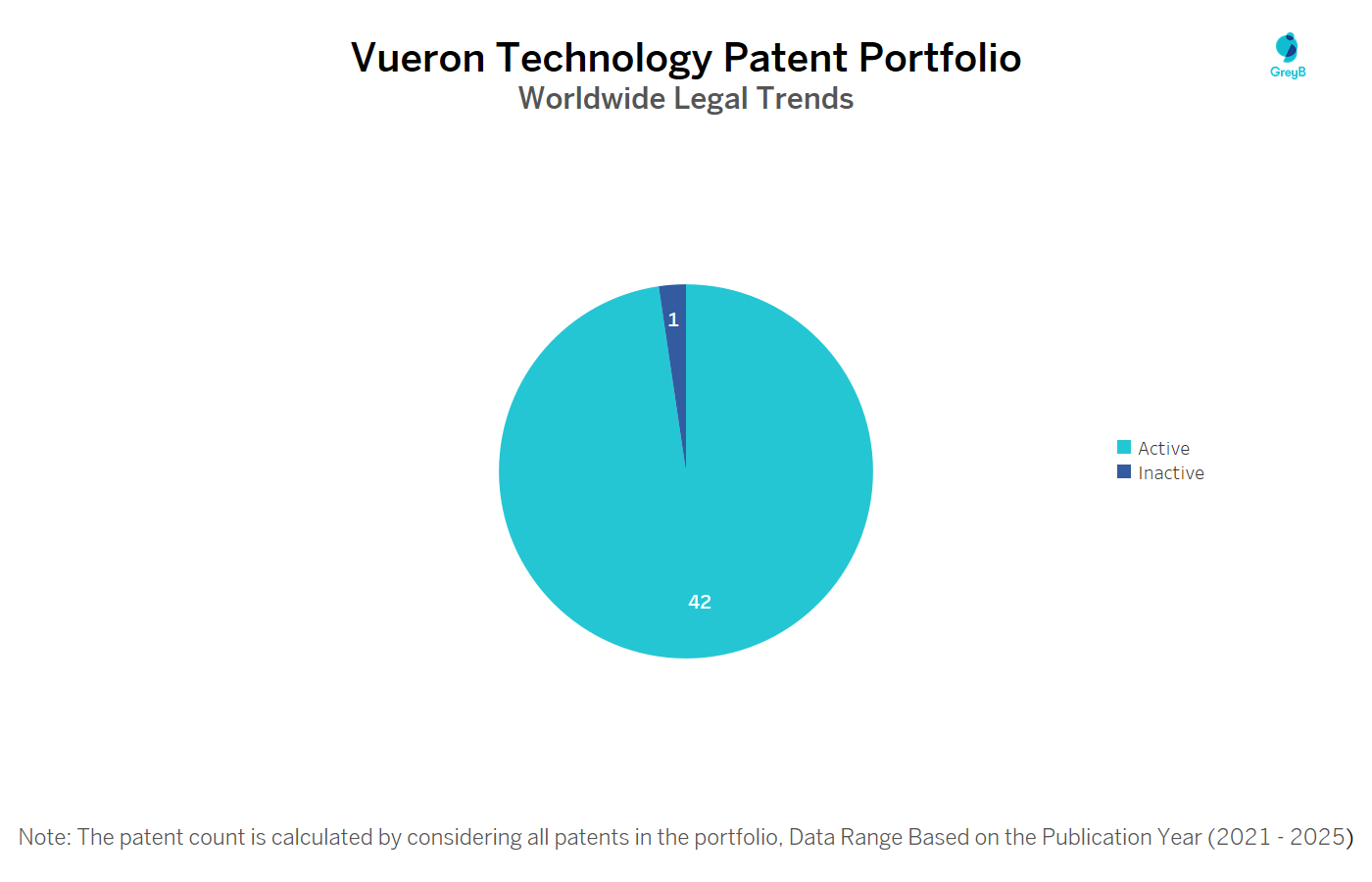
Vueron Technology has a total of 43 patents globally, out of which 34 have been granted. Of these 43 patents, 97% patents are active. South Korea is where Vueron Technology has filed the maximum number of patents, followed by United States of America. Parallelly, the South Korea seems to be the main focused R&D centre and South Korea is the origin country of Vueron Technology.
Vueron Technology was founded in 2019. Vueron is a leading LiDAR perception software provider specializing in automotive ADAS, IoT security, and R&D SDK solutions. Their point processing-based software delivers reliable, high-performance object detection without missing data or false alarms. Vueron’s customizable, cost-effective technology is optimized for industrial applications using C language and can be processed on a single CPU.
Do read about some of the most popular patents of Vueron Technology which have been covered by us in this article and also you can find Vueron Technology patents information, the worldwide patent filing activity and its patent filing trend over the years, and many other stats over Vueron Technology patent portfolio.
How many patents does Vueron Technology have?
Vueron Technology has a total of 43 patents globally. These patents belong to 27 unique patent families. Out of 43 patents, 42 patents are active.
How Many Patents did Vueron Technology File Every Year?
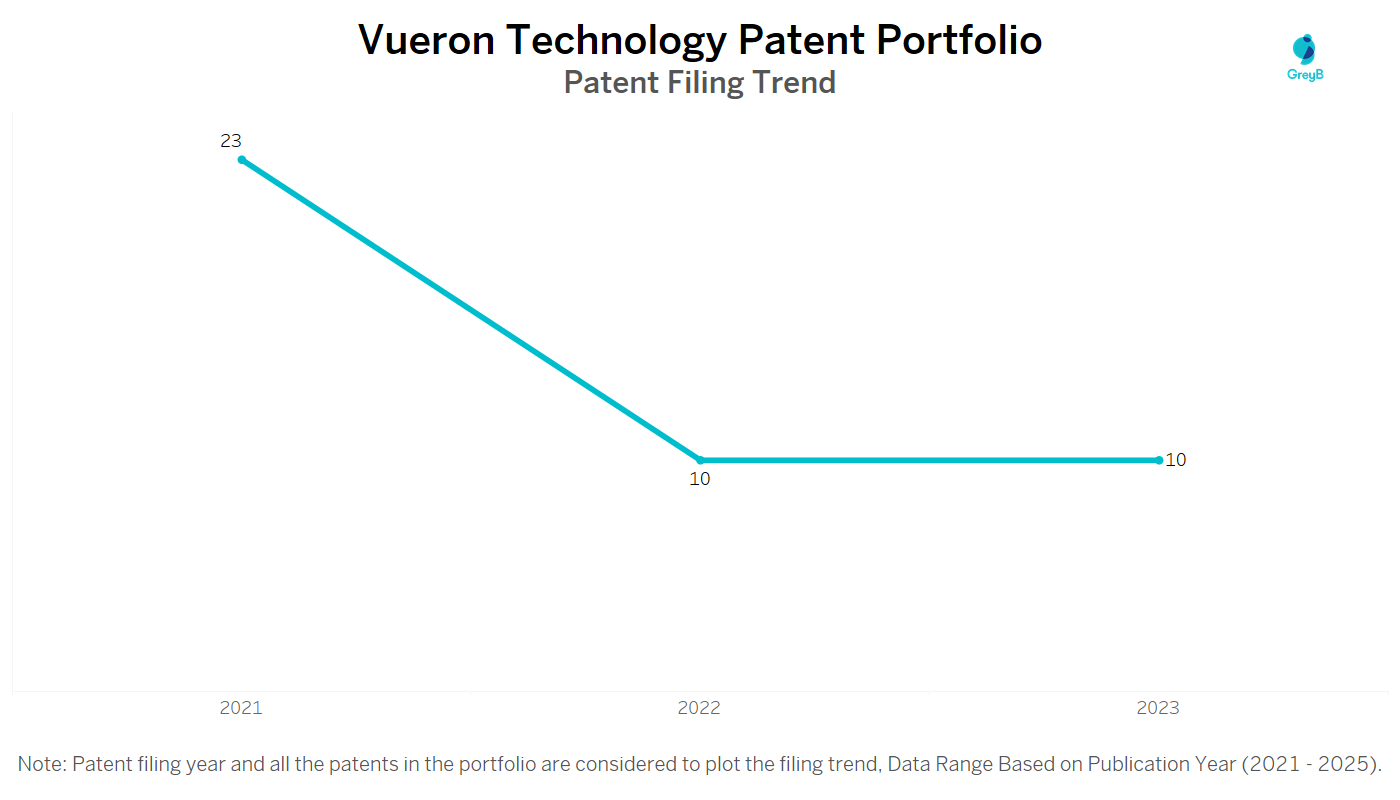
Are you wondering why there is a drop in patent filing for the last two years? It is because a patent application can take up to 18 months to get published. Certainly, it doesn’t suggest a decrease in the patent filing.
| Year of Patents Filing or Grant | Vueron Technology Applications Filed | Vueron Technology Patents Granted |
| 2025 | – | 7 |
| 2024 | – | 10 |
| 2023 | 10 | 4 |
| 2022 | 10 | 11 |
| 2021 | 23 | 2 |
How many Vueron Technology patents are Alive/Dead?
Worldwide Patents
How Many Patents did Vueron Technology File in Different Countries?
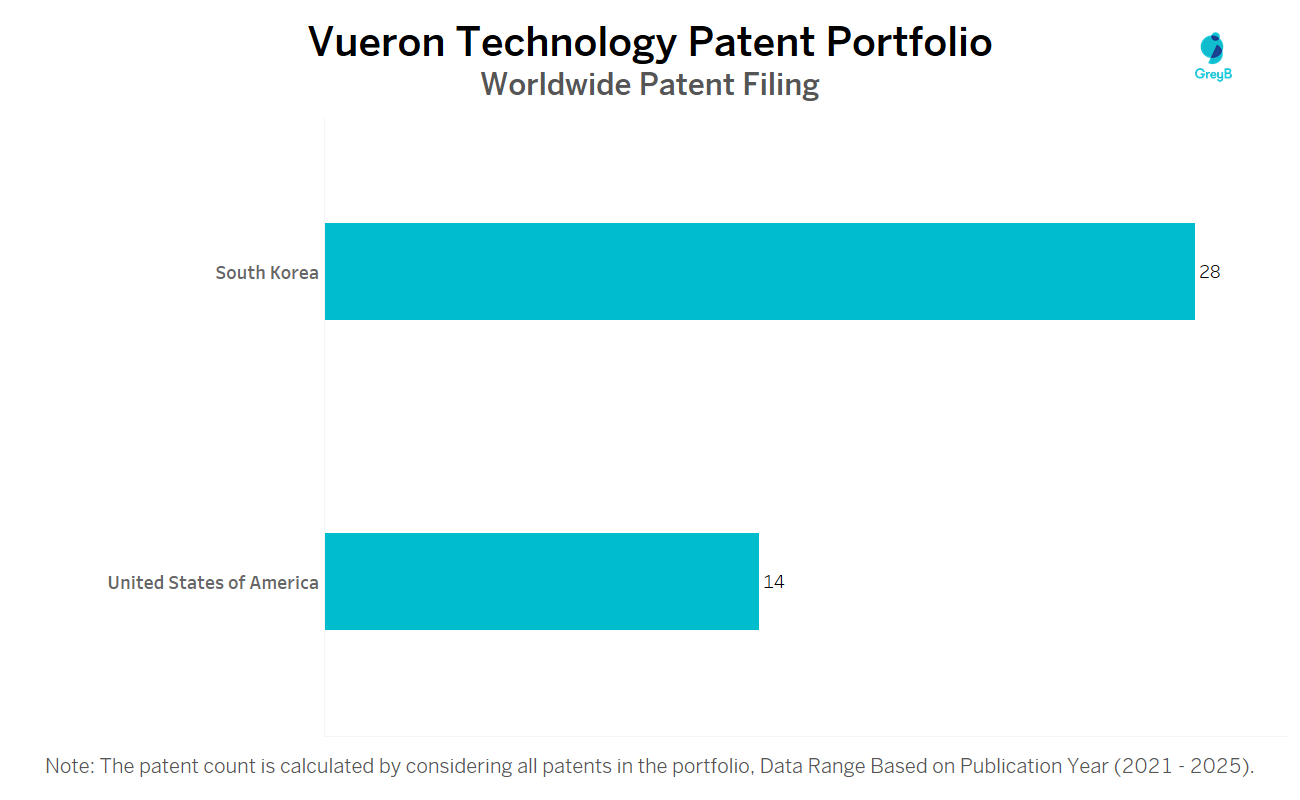
Countries in which Vueron Technology Filed Patents
| Country | Patents |
| South Korea | 28 |
| United States of America | 14 |
Where are Research Centers of Vueron Technology Patents Located?
The Research Centre for all the Vueron Technology patents is the United States of America.
Best Vueron Technology Patents
US10809003B2 is the most popular patent in the Vueron Technology portfolio. It has received 18 citations so far from companies like Mitsubishi Electric Corporation, Apollo Intelligent Driving Technology.
Below is the list of most cited patents of Vueron Technology:
| Publication Number | Citation Count |
| US12046052B2 | 4 |
| KR102423781B1 | 4 |
| KR102426583B1 | 3 |
| KR102371502B1 | 3 |
| US20230060270A1 | 2 |
| KR102378646B1 | 2 |
| KR102378649B1 | 2 |
| KR102378643B1 | 2 |
| US20240153102A1 | 1 |
| KR102444675B1 | 1 |
List of Vueron Technology Patents
| Vueron Technology Patents | Title |
| US12046052B2 | Method For Detecting Lane Line Using Lidar Sensor And Lane Detection Device For Performing The Method |
| KR102423781B1 | Method Of Detecting Guard-Rail Using Lidar Sensor And Guard-Rail Detection Device Performing Method |
| KR102426583B1 | Method Of Detecting Signpost Using Lidar Sensor And Signpost Detection Device Performing Method |
| KR102371502B1 | Method Of Detecting Tunnel And Overpass Using Lidar Sensor And A Tunnel Detection Device Performing Method |
| US20230060270A1 | Method For Generating Dynamic Map Using Lidar Sensor And Determining Object Using Generated Dynamic Map, And Apparatus Performing The Method |
| KR102378646B1 | Method And System For Applying Point Properties Of Lidar Point Data |
| KR102378649B1 | Method And System For Determining Ground And Non-Ground Of Lidar Point Data |
| KR102378643B1 | Method And System For Determining Ground And Ceiling Of Lidar Point Data |
| US20240153102A1 | Method And Device For Tracking Objects Detected Through Lidar Points |
| KR102444675B1 | Apparatus And Method For Predicting Lane-Change Of Surrounding Objects |
| KR102367138B1 | Method Of Detection Crosswalk Using Lidar Sensor And Crosswalk Detection Device Performing Method |
| US12326505B2 | Object Shape Detection Apparatus And Method |
| US12313745B2 | Method Of Detecting Tunnel And Overpass By Using Lidar Sensor And Apparatus Therefor |
| US12287435B2 | Method And System For Calibrating Lidar Point Data |
| US12272088B2 | Method For Detecting Crosswalk Using Lidar Sensor And Crosswalk Detection Device For Performing The Method |
| KR102822131B1 | Apparatus, Method, Computer-Readable Storage Medium And Computer Program For Tracking Object Based On Point Cloud Of Lidar Using Adaptive Prediction Area |
| KR102779962B1 | Cut-In Estimating Method And Apparatus Based On Fmcw Lidar |
| KR102779952B1 | Velocity Estimating Method And Apparatus Based On Fmcw Lidar |
| US12112549B2 | Method For Detecting Traffic Sign Using Lidar Sensor And Traffic Sign Detection Device Performing The Method |
| US11954915B2 | Method For Detecting Guard-Rail Using Lidar Sensor And Guard-Rail Detection Device Performing The Method |
| US11884303B2 | Apparatus And Method For Determining Lane Change Of Surrounding Objects |
| KR102740186B1 | Object Tracking Method And Apparatus Robust Against Occlusion Between Objects |
| KR102704485B1 | Point-Based Parking Judgement Method And Device |
| KR102698573B1 | Object Association Method And Apparatus For Utilizing Object Information |
| KR102698583B1 | Object Management Method And Apparatus Between Pedestrian And Non-Pedestrian Objects |
| KR102675555B1 | Parking Judgement Method And Device Based On Watch Zone |
| KR102659756B1 | Object Association Method And Apparatus For Utilizing Object Information |
| US20240062650A1 | Traffic Line Detection Method And Apparatus Using Movement Path Of Moving Object, And Computer Readable Storage Medium Storing Instructions To Perform Traffic Line Detection Method |
| KR1020240023908A | Lane Detection Method And Apparatus Using The Moving Path Of The Moving Object |
| KR102574050B1 | Method And Device For Tracking Objects Detected By Lidar Points |
| KR102499334B1 | Method Of Detecting Lane Using Lidar Sensor And A Traffic Lane Detection Device Performing Method |
| KR102497874B1 | Method And System For Determining Ground And Ceiling Of Lidar Point Data |
| KR102486496B1 | How To Detect Road Surfaces Using Lidar Sensors |
| US20230023199A1 | Method And System For Detecting Lane Line Based On Lidar Data |
| KR1020230073601A | Method Of Detection Crosswalk Using Lidar Sensor And Crosswalk Detection Device Performing Method |
| KR102470705B1 | Method And System For Calibrating Lidar Point Data |
| KR102444672B1 | Method Of Generating Dynamic Map Using Lidar Sensor And Determining Object Using Generated Dynamic Map, And Apparatus Performing Method |
| KR102408402B1 | Method Of Detecting Road-Curb Using Lidar Sensor And A Road-Curb Detection Device Performing Method |
| US20220413147A1 | Method For Detecting Ground Using Lidar Sensor And Ground Detection Device Performing Same |
| US20220404467A1 | Method Of Detecting Road-Curb With Lidar Sensor And Road-Curb Detecting Apparatus For Performing The Method |
| WO2022270751A1 | Method And Device For Detecting Road Surface By Using Lidar Sensor |
| KR102333828B1 | Lane Detection Method And System Based On Lidar Data |
| KR102275671B1 | Object Contour Detection Apparatus And Method |
What are Vueron Technology key innovation segments?
What Technologies are Covered by Vueron Technology?

The chart below distributes patents filed by Vueron Technology in different countries on the basis of the technology protected in patents. It also represents the markets where Vueron Technology thinks it’s important to protect particular technological inventions.

R&D Focus: How has Vueron Technology search focus changed over the years?
EXCLUSIVE INSIGHTS COMING SOON!
Interested in knowing about the areas of innovation that are being protected by Vueron Technology?